Department of Computer Science and Computer Engineering
504 J. B. Hunt Building
1 University of Arkansas
Fayetteville, AR 72701
Phone: (479) 575-6197
Fax: (479)-575-5339
Bobda Awarded NSF Grant
 Dr. Christophe Bobda has received an NSF award to conduct research in vision systems
for autonomous vehicles. Vision systems are an essential part of industrial trucks,
also known as Automated Guided Vehicles (AGVs). Dr. Bobda's research will enable AGVs
to be controlled in indoor environments without centralized coordination.
Dr. Christophe Bobda has received an NSF award to conduct research in vision systems
for autonomous vehicles. Vision systems are an essential part of industrial trucks,
also known as Automated Guided Vehicles (AGVs). Dr. Bobda's research will enable AGVs
to be controlled in indoor environments without centralized coordination.
AGVs have the potential to revolutionize operations in areas such as manufacturing, product distribution, health care, and military. For example, they can efficiently accomplish the mundane and often repetitive task of transporting materials in distribution centers. They could even be used in nursing homes to move disabled people around. Autonomous robot systems have recently been introduced with Amazon’s Kiva and Seegrid in distribution centers to transport items around. Unfortunately, they are limited to specific and restrictive environments. Generic models, tools, and technologies are missing to actively capture the world with semantically labeled objects, actions and events, and to generate goals, priorities, and plans. Dr. Bobda's research will address these challenges.
The solutions that Dr. Bobda will investigate address the requirements of decentralized
coordination and real-time environmental changes, as occurs i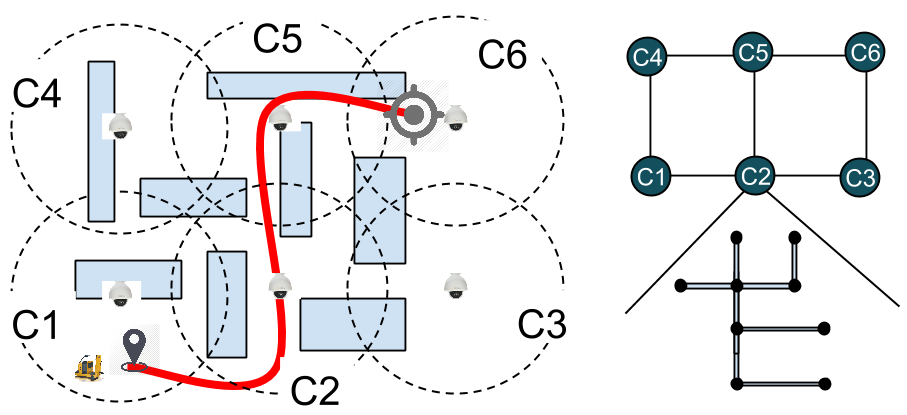 n production facilities. The approach uses a set of distributed ceiling-mounted smart
cameras with overlapping fields-of-view, and cameras mounted on AGVs. Multi-truck
coordination is then framed as the problem of routing packets in a dynamic and hierarchical
network where cameras represent routers and trucks represent packets. To address the
complexity of image processing tasks, a hardware/software implementation is followed
with an FPGA-based target platform from a previous NSF-Funded project.
n production facilities. The approach uses a set of distributed ceiling-mounted smart
cameras with overlapping fields-of-view, and cameras mounted on AGVs. Multi-truck
coordination is then framed as the problem of routing packets in a dynamic and hierarchical
network where cameras represent routers and trucks represent packets. To address the
complexity of image processing tasks, a hardware/software implementation is followed
with an FPGA-based target platform from a previous NSF-Funded project.
This research will enable manufacturing and distribution companies to optimize indoor transportation activities in existing arrangements, without modification of available infrastructure, and reduce labor and operating costs by redeploying employees to value-added roles. In addition, AGVs will enable autonomous mobile robot applications in numerous other unstructured environments, including: hospitals, malls, retail stores, critical infrastructure, airports, schools, and sports venues. The project is conducted as a joint effort between the University of Arkansas in Fayetteville and R-Dex in Atlanta, and will provide undergraduate and graduate students opportunities to perform their work in academic and industrial environments.